| Estimators |
Primary estimator |
Selects which estimator is used for commutation and velocity feedback. |
| Estimators |
Active estimators |
Selects which estimators are active, in addition to
the primary estimator used for commutation |
| Operating parameters |
Minimum velocity |
Determines minimum operating velocity |
| Operating parameters |
Coastdown: Velocity threshold |
Determines velocity threshold used to estimate when a motor stops |
| Operating parameters |
Coastdown: Time |
Determines time to wait until a motor stops |
| Operating parameters |
Slew rate: max acceleration |
Determines maximum velocity slew rate in motoring quadrants |
| Operating parameters |
Slew rate: max deceleration |
Determines maximum velocity slew rate in generating quadrants |
| Operating parameters |
Max velocity |
Determines maximum velocity command, as a ratio of nominal motor velocity |
| Operating parameters |
Full-scale velocity |
Determines full-scale velocity, as a ratio of nominal motor velocity |
| Operating parameters |
Saliency: Saliency threshold |
Determines saliency ratio below which the motor’s saliency is neglected |
| Flux control |
Flux control method |
Selects flux control method (or “None” if disabled) |
| Flux control |
Current limit: Boundary type |
Selects method used for defining the commanded Idq boundary |
| Flux control |
Current limit: Idmax |
Determines the maximum negative d-axis current |
| Flux control |
Current limit: Iqmax |
Determines the maximum q-axis current |
| Flux control |
Flux weakening: Voltage limit |
Determines the voltage amplitude limit used in flux weakening (FW) |
| Flux control |
MTPA: Idmax-MTPA |
Displays the maximum d-axis current allocated to MTPA, as a function of (Ld − Lq) and Imax (Indication only) |
| Flux control |
MTPA: gain-MTPA |
Displays the maximum increase in torque due to MTPA (Indication only) |
| Dead-time compensation |
Dead-time compensation method |
Selects dead-time compensation method (or “None” if disabled) |
| Dead-time compensation |
Current linearity range |
Determines linear range of currents used for deadtime compensation; larger currents are treated as ±1 |
| Dead-time compensation |
Forward gain |
Determines gain for dead-time compensation in the forward path |
| Dead-time compensation |
Feedback gain |
Determines gain for dead-time compensation in the feedback path |
| Fault detection |
Undervoltage margin |
Determines undervoltage threshold margin |
| Fault detection |
Overvoltage margin |
Determines overvoltage threshold margin |
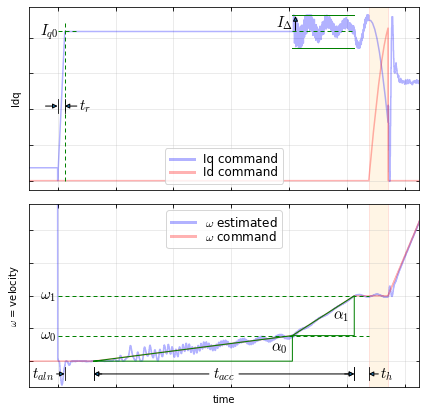
| Startup |
Startup current |
Determines current used during startup |
| Startup |
Rampup time |
Determines current rampup time during startup |
| Startup |
Align time |
Determines time to remain in the align state during startup |
| Startup |
Min accel time |
Determines minimum acceleration time during startup |
| Startup |
Acceleration \(\alpha_1\) |
Determines fast acceleration rate |
| Startup |
Acceleration \(\alpha_0\) |
Determines slow acceleration rate |
| Startup |
Hold time |
Determines time to remain in the hold state during startup |
| Startup |
Speed threshold \(\omega_0\) |
Determines speed threshold for switching to fast acceleration |
| Startup |
Angle converge rate |
Determines rate of angle convergence during closed-loop transition of classic startup |
| Startup |
Startup algorithm |
Selects startup method |
| Startup |
Active damping: max amplitude |
Determines maximum amplitude of active damping current |
| Startup |
Active damping: max gain |
Determines maximum gain of active damping |
| Startup |
Active damping: speed threshold |
Determines the minimum velocity to enable active damping |
| Overmodulation |
D-axis limit |
Determines the maximum d-axis voltage |
| Overmodulation |
Q-axis limit |
Determines the maximum q-axis voltage |
| AN1292 PLL |
Time constant |
Specifies the velocity estimation time constant |
| AN1292 PLL |
Loop filter bandwidth |
Specifies the loop filter bandwidth |
| AN1292 PLL |
Filter threshold |
Determines maximum velocity for slow filtering in the PLL |
| Quadrature encoder |
Lines |
Specifies the number of lines of the encoder |
| Quadrature encoder |
Index pulse present |
Specifies whether an index pulse is present |
| Quadrature encoder |
Tracking loop time constant |
Determines bandwidth of tracking loop |
| Quadrature encoder |
Synchronization method |
Selects method of synchronizing encoder with back-emf |
| Quadrature encoder |
Align angle shift |
Determines angle shift between rampup and align states of startup |
| Quadrature encoder |
Align initial angle |
Determines initial angle used in rampup state of startup |
| Quadrature encoder |
Align-and-sweep rate |
Determines rotation rate during align state of startup, when using align-and-sweep method |
| Quadrature encoder |
Align-and-sweep setup angle |
Determines setup angle of align-and-sweep method, to allow transients to settle prior to measurements |
| Quadrature encoder |
Pullout slip threshold |
Determines rotor slip threshold used for detecting a pullout condition |
| Motion Control API |
Filter time constant Is |
Determines the time constant used for calculating low pass filtered value of amplitude of current in the motor (Is) |
| Motion Control API |
Filter time constant Iq |
Determines the time constant used for calculating low pass filtered value of the measured q-axis current in the motor (Iq) |
| Board Service |
UI service period |
Determines the rate at which the board service ISR tasks get executed. |
| Board Service |
Button debounce time |
Determines the length of time required to register a logical high signal as a button press. |
| Board Service |
Long button press time |
Determines the amount of time before a button press is detected as a long button press. |